In [24]:
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
from scipy import stats
import seaborn as sns
import warnings
import random
from datetime import datetime
random.seed(datetime.now())
warnings.filterwarnings('ignore')
# Make plots larger
plt.rcParams['figure.figsize'] = (10, 6)
Deep learning and neural networks are increasingly important concepts as demonstrated through their performance on difficult problems in computer vision, medical diagnosis, natural language processing and many other domains. Deep learning algorithms are unique in that they try to learn latent features from data, as opposed to traditional machine learning where features selection is typically handcrafted. However, the semantics of deep neural networks “hidden layers” are poorly understood, and are often treated as “black box” models. The aim of Latent Space Visualization is to develop tools and algorithms to better understand the semantics of the latent features learned by deep networks, particularly those used for unsupervised deep learning.
The word “latent” means “hidden”. In a neural networks some of the data is in the space that you can observe, and other data is within “hidden layers.”
In latent Dirichlet allocation (LDA) the "latent space" is the vector space within which the vectors that make up the topics found by LDA are found.
In both cases, the "latent space" allows sets of observations to be mapped by unobserved groups that explain why some parts of the data are similar.
The values in the “hidden layers” are typically numerical weights usually represented as vectors. This means we can plot, calculate distance and similarlity and use any matheimatical technique especially those that work with vectors on the latent space.
The basic idea behind latent space visualization is to map numbers in the hidden layers whose values are usually just weights to output that has meaning.
t-distributed stochastic neighbor embedding (t-SNE) is a machine learning algorithm for dimensionality reduction developed by Geoffrey Hinton and Laurens van der Maaten. It is a nonlinear dimensionality reduction technique that is particularly well-suited for embedding high-dimensional data into a space of two or three dimensions, which can then be visualized in a scatter plot. Specifically, it models each high-dimensional object by a two- or three-dimensional point in such a way that similar objects are modeled by nearby points and dissimilar objects are modeled by distant points.
The t-SNE algorithm comprises two main stages.
Step 1
First, t-SNE constructs a probability distribution over pairs of high-dimensional objects in such a way that similar objects have a high probability of being picked, whilst dissimilar points have an extremely small probability of being picked.
Step 2
Second, t-SNE defines a similar probability distribution over the points in the low-dimensional map, and it minimizes the Kullback–Leibler divergence between the two distributions with respect to the locations of the points in the map. Note that whilst the original algorithm uses the Euclidean distance between objects as the base of its similarity metric, this should be changed as appropriate.
Kullback–Leibler divergence
For discrete probability distributions P and Q, the Kullback–Leibler divergence from Q to P is defined^1 to be
$$D_{\mathrm{KL}}(P\|Q) = \sum_i P(i) \, \log\frac{P(i)}{Q(i)}.$$In other words, it is the expectation of the logarithmic difference between the probabilities P and Q, where the expectation is taken using the probabilities P. The Kullback–Leibler divergence is defined only if Q(i)=0 implies P(i)=0, for all i (absolute continuity). Whenever P(i) is zero the contribution of the i-th term is interpreted as zero because $\lim_{x \to 0} x \log(x) = 0$.
For distributions P and Q of a continuous random variable, the Kullback–Leibler divergence is defined to be the integral:
$$D_{\mathrm{KL}}(P\|Q) = \int_{-\infty}^\infty p(x) \, \log\frac{p(x)}{q(x)} \, dx,$$where p and q denote the densities of P and Q.
More generally, if P and Q are probability measures over a set X, and P is absolutely continuous with respect to Q, then the Kullback–Leibler divergence from Q to P is defined as
$$D_{\mathrm{KL}}(P\|Q) = \int_X \log\frac{dP}{dQ} \, dP,$$where $\frac{dP}{dQ}$ is the Radon–Nikodym derivative of P with respect to Q, and provided the expression on the right-hand side exists. Equivalently, this can be written as
$$D_{\mathrm{KL}}(P\|Q) = \int_X \log\!\left(\frac{dP}{dQ}\right) \frac{dP}{dQ} \, dQ,$$which we recognize as the entropy of P relative to Q. Continuing in this case, if $\mu$ is any measure on X for which $p = \frac{dP}{d\mu}$ and $q = \frac{dQ}{d\mu}$ exist (meaning that p and q are absolutely continuous with respect to $\mu$), then the Kullback–Leibler divergence from Q to P is given as
$$D_{\mathrm{KL}}(P\|Q) = \int_X p \, \log \frac{p}{q} \, d\mu. \!$$The logarithms in these formulae are taken to base 2 if information is measured in units of bits, or to base e if information is measured in nats. Most formulas involving the Kullback–Leibler divergence hold regardless of the base of the logarithm.
Various conventions exist for referring to D~KL~(P‖Q) in words. Often it is referred to as the divergence between P and Q; however this fails to convey the fundamental asymmetry in the relation. Sometimes, as in this article, it may be found described as the divergence of P from, or with respect to Q. This reflects the asymmetry in Bayesian inference, which starts from a prior Q and updates to the posterior P.
Given a set of $N$ high-dimensional objects $\mathbf{x}_1, \dots, \mathbf{x}_N$, t-SNE first computes probabilities $p_{ij}$ that are proportional to the similarity of objects $\mathbf{x}_i$ and $\mathbf{x}_j$, as follows:
$$p_{j\mid i} = \frac{\exp(-\lVert\mathbf{x}_i - \mathbf{x}_j\rVert^2 / 2\sigma_i^2)}{\sum_{k \neq i} \exp(-\lVert\mathbf{x}_i - \mathbf{x}_k\rVert^2 / 2\sigma_i^2)},$$
As Van der Maaten and Hinton explained : “The similarity of datapoint $x_j$ to datapoint $x_i$ is the conditional probability, $p_{j|i}$, that $x_i$ would pick $x_j$ as its neighbor if neighbors were picked in proportion to their probability density under a Gaussian centered at $x_i$.”
$$p_{ij} = \frac{p_{j\mid i} + p_{i\mid j}}{2N}$$
The bandwidth of the [Gaussian kernels] $\sigma_i$, is set in such a way that the [perplexity] of the conditional distribution equals a predefined perplexity using the [bisection method]. As a result, the bandwidth is adapted to the [density] of the data: smaller values of $\sigma_i$ are used in denser parts of the data space.
t-SNE aims to learn a $d$-dimensional map $\mathbf{y}_1, \dots, \mathbf{y}_N$ (with $\mathbf{y}_i \in \mathbb{R}^d$) that reflects the similarities $p_{ij}$ as well as possible. To this end, it measures similarities $q_{ij}$ between two points in the map $\mathbf{y}_i$ and $\mathbf{y}_j$, using a very similar approach. Specifically, $q_{ij}$ is defined as:
$$q_{ij} = \frac{(1 + \lVert \mathbf{y}_i - \mathbf{y}_j\rVert^2)^{-1}}{\sum_{k \neq m} (1 + \lVert \mathbf{y}_k - \mathbf{y}_m\rVert^2)^{-1}}$$
Herein a heavy-tailed [Student-t distribution] (with one-degree of freedom, which is the same as a [Cauchy distribution]) is used to measure similarities between low-dimensional points in order to allow dissimilar objects to be modeled far apart in the map.
The locations of the points $\mathbf{y}_i$ in the map are determined by minimizing the (non-symmetric) [Kullback–Leibler divergence] of the distribution $Q$ from the distribution $P$, that is:
$$KL(P||Q) = \sum_{i \neq j} p_{ij} \log \frac{p_{ij}}{q_{ij}}$$
The minimization of the Kullback–Leibler divergence with respect to the points $\mathbf{y}_i$ is performed using [gradient descent]. The result of this optimization is a map that reflects the similarities between the high-dimensional inputs well.
In [25]:
from keras.datasets import mnist
import numpy as np
import matplotlib.pyplot as plt
from keras.layers import Input, Dense, Convolution2D, MaxPooling2D, UpSampling2D
from keras.models import Model
from keras.callbacks import TensorBoard
from keras.models import model_from_json
import cv2 # pip install opencv-python
import sys
import os
from random import shuffle, randint, choice
In [26]:
# Generates random image with squares and circles
def getRandomImage():
imageSize = 100
size = 25
nbShapes = 5
xy = lambda: randint(0,100)
# Create a white image
img = np.zeros((imageSize,imageSize,3), np.uint8)
cv2.rectangle(img,(0,0),(imageSize,imageSize),(122,122,122) ,-1)
greyImg = np.copy(img)
# Adds some shapes
for i in range(nbShapes):
x0, y0 = xy(), xy()
isRect = choice((True,False))
if isRect:
cv2.rectangle(img,(x0,y0),(x0+size,y0+size),(255,0,0) ,-1)
cv2.rectangle(greyImg,(x0,y0),(x0+size,y0+size),(255,255,255) ,-1)
else:
cv2.circle(img,(x0,y0), size/2, (0,0,255), -1)
cv2.circle(greyImg,(x0,y0), size/2, (255,255,255), -1)
return cv2.resize(img,(48,48)), cv2.resize(greyImg,(48,48))
In [27]:
# Creates the dataset
def getDataset(display=False):
# Show what the dataset looks like
if display:
colorImg, greyImg = getRandomImage()
img = np.hstack((colorImg, greyImg))
cv2.imshow("Dataset",cv2.resize(img,(200,100)))
cv2.waitKey(0)
cv2.destroyAllWindows()
#for i in range
x_train, x_test, y_train, y_test = [], [], [], []
# Add training examples
for i in range(10000):
colorImg, greyImg = getRandomImage()
greyImg = cv2.cvtColor(greyImg, cv2.COLOR_RGB2GRAY)
x_train.append(greyImg.astype('float32')/255.)
y_train.append(colorImg.astype('float32')/255.)
# Add test examples
for i in range(1000):
colorImg, greyImg = getRandomImage()
greyImg = cv2.cvtColor(greyImg, cv2.COLOR_RGB2GRAY)
x_test.append(greyImg.astype('float32')/255.)
y_test.append(colorImg.astype('float32')/255.)
# Reshape
x_train = np.array(x_train).reshape((-1,48,48,1))
x_test = np.array(x_test).reshape((-1,48,48,1))
y_train = np.array(y_train).reshape((-1,48,48,3))
y_test = np.array(y_test).reshape((-1,48,48,3))
return x_train, y_train, x_test, y_test
In [28]:
# Creates the Convolutional Auto Encoder
def getModel():
input_img = Input(shape=(48, 48, 1))
x = Convolution2D(16, 3, 3, activation='relu', border_mode='same', dim_ordering='tf')(input_img)
x = MaxPooling2D((2, 2), border_mode='same', dim_ordering='tf')(x)
x = Convolution2D(32, 3, 3, activation='relu', border_mode='same', dim_ordering='tf')(input_img)
x = MaxPooling2D((2, 2), border_mode='same', dim_ordering='tf')(x)
x = Convolution2D(64, 3, 3, activation='relu', border_mode='same', dim_ordering='tf')(x)
encoded = MaxPooling2D((2, 2), border_mode='same', dim_ordering='tf')(x)
#6x6x32 -- bottleneck
x = UpSampling2D((2, 2), dim_ordering='tf')(encoded)
x = Convolution2D(32, 3, 3, activation='relu', border_mode='same', dim_ordering='tf')(x)
x = UpSampling2D((2, 2), dim_ordering='tf')(x)
x = Convolution2D(16, 3, 3, activation='relu', border_mode='same', dim_ordering='tf')(x)
decoded = Convolution2D(3, 3, 3, activation='relu', border_mode='same', dim_ordering='tf')(x)
#Create model
autoencoder = Model(input_img, decoded)
return autoencoder
In [29]:
# Trains the model for 10 epochs
def trainModel():
# Load dataset
print("Loading dataset...")
x_train_gray, x_train, x_test_gray, x_test = getDataset()
# Create model description
print("Creating model...")
model = getModel()
model.compile(optimizer='rmsprop', loss='binary_crossentropy',metrics=['accuracy'])
# Train model
print("Training model...")
model.fit(x_train_gray, x_train, nb_epoch=10, batch_size=148, shuffle=True, validation_data=(x_test_gray, x_test), callbacks=[TensorBoard(log_dir='/tmp/tb', histogram_freq=0, write_graph=False)])
# Evaluate loaded model on test data
print("Evaluating model...")
score = model.evaluate(x_train_gray, x_train, verbose=0)
print ("%s: %.2f%%" % (model.metrics_names[1], score[1]*100))
# Serialize model to JSON
print("Saving model...")
model_json = model.to_json()
with open("model.json", "w") as json_file:
json_file.write(model_json)
# Serialize weights to HDF5
print("Saving weights...")
model.save_weights("model.h5")
In [30]:
# Tests the model and shows results
def testModel():
# Load JSON model description
with open('model.json', 'r') as json_file:
modelJSON = json_file.read()
# Build model from JSON description
print("Loading model...")
model = model_from_json(modelJSON)
# Load weights
print("Loading weights...")
model.load_weights("model.h5")
_, _, x_test_gray, x_test = getDataset()
x_test_gray = x_test_gray[:10]
x_test = x_test[:10]
print("Making predictions...")
predictions = model.predict(x_test_gray)
x_test_gray = [cv2.cvtColor(img,cv2.COLOR_GRAY2RGB) for img in x_test_gray]
img = np.vstack((np.hstack(x_test_gray),np.hstack(predictions),np.hstack(x_test)))
cv2.imshow("Input - Reconstructed - Ground truth",cv2.resize(img,(img.shape[1],img.shape[0])))
cv2.waitKey(0)
cv2.destroyAllWindows()
The MNIST database of handwritten digits, available from this page, has a training set of 60,000 examples, and a test set of 10,000 examples. It is a subset of a larger set available from NIST. The digits have been size-normalized and centered in a fixed-size image.
It is a good database for people who want to try learning techniques and pattern recognition methods on real-world data while spending minimal efforts on preprocessing and formatting.
In [31]:
# load the MNIST dataset
(X_train, y_train), (X_test, y_test) = mnist.load_data()
# plot first 4 images as gray scale
plt.subplot(221)
plt.imshow(X_train[0], cmap=plt.get_cmap('gray'))
plt.subplot(222)
plt.imshow(X_train[1], cmap=plt.get_cmap('gray'))
plt.subplot(223)
plt.imshow(X_train[2], cmap=plt.get_cmap('gray'))
plt.subplot(224)
plt.imshow(X_train[3], cmap=plt.get_cmap('gray'))
# show the plot
plt.show()
This example is from Latent space visualization — Deep Learning bits #2
t-SNE visualization of MNIST validation set
The autoencoder successfully reconstructs the digits. The reconstruction is blurry because the input is compressed.
t-SNE projection of latent space representations from the MNIST validation set
Code for Latent space visualization — Deep Learning bits #2 is at https://github.com/despoisj/LatentSpaceVisualization
In [32]:
import os
import sys
import h5py
import cv2
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.offsetbox import OffsetImage, AnnotationBbox
from matplotlib.backends.backend_agg import FigureCanvasAgg as FigureCanvas
from scipy.stats import norm
from sklearn import manifold
from keras.layers import Input, Dense, Lambda, Flatten, Reshape
from keras.layers import Convolution2D, UpSampling2D, MaxPooling2D
from keras.models import Model
from keras.layers.advanced_activations import ELU
from keras import backend as K
from keras import objectives
# Config
modelsPath = "Models/"
visualsPath = "Visuals/"
imageSize = 28
latent_dim = 32
# Convolutional models
# x is input, z is
def getModels():
input_img = Input(shape=(imageSize, imageSize, 1))
x = Convolution2D(32, 3, 3, border_mode='same')(input_img)
x = ELU()(x)
x = MaxPooling2D((2, 2), border_mode='same')(x)
x = Convolution2D(64, 3, 3, border_mode='same')(x)
x = ELU()(x)
x = MaxPooling2D((2, 2), border_mode='same')(x)
# Latent space // bottleneck layer
x = Flatten()(x)
x = Dense(latent_dim)(x)
z = ELU()(x)
##### MODEL 1: ENCODER #####
encoder = Model(input_img, z)
# We instantiate these layers separately so as to reuse them for the decoder
# Dense from latent space to image dimension
x_decoded_dense1 = Dense(7 * 7 * 64)
# Reshape for image
x_decoded_reshape0 = Reshape((7, 7, 64))
x_decoded_upsample0 = UpSampling2D((2, 2))
x_decoded_conv0 = Convolution2D(32, 3, 3, border_mode='same')
x_decoded_upsample3 = UpSampling2D((2, 2))
x_decoded_conv3 = Convolution2D(1, 3, 3, activation='sigmoid', border_mode='same')
# Create second part of autoencoder
x_decoded = x_decoded_dense1(z)
x_decoded = ELU()(x_decoded)
x_decoded = x_decoded_reshape0(x_decoded)
x_decoded = x_decoded_upsample0(x_decoded)
x_decoded = x_decoded_conv0(x_decoded)
x_decoded = ELU()(x_decoded)
# Tanh layer
x_decoded = x_decoded_upsample3(x_decoded)
decoded_img = x_decoded_conv3(x_decoded)
##### MODEL 2: AUTO-ENCODER #####
autoencoder = Model(input_img, decoded_img)
# Create decoder
input_z = Input(shape=(latent_dim,))
x_decoded_decoder = x_decoded_dense1(input_z)
x_decoded_decoder = ELU()(x_decoded_decoder)
x_decoded_decoder = x_decoded_reshape0(x_decoded_decoder)
x_decoded_decoder = x_decoded_upsample0(x_decoded_decoder)
x_decoded_decoder = x_decoded_conv0(x_decoded_decoder)
x_decoded_decoder = ELU()(x_decoded_decoder)
# Tanh layer
x_decoded_decoder = x_decoded_upsample3(x_decoded_decoder)
decoded_decoder_img = x_decoded_conv3(x_decoded_decoder)
##### MODEL 3: DECODER #####
decoder = Model(input_z, decoded_decoder_img)
return autoencoder, encoder, decoder
In [33]:
import os
import sys
import h5py
import cv2
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.offsetbox import OffsetImage, AnnotationBbox
from matplotlib.backends.backend_agg import FigureCanvasAgg as FigureCanvas
from scipy.stats import norm
from sklearn import manifold
from keras.layers import Input, Dense, Lambda, Flatten, Reshape
from keras.layers import Convolution2D, UpSampling2D, MaxPooling2D
from keras.models import Model
from keras.layers.advanced_activations import ELU
from keras import backend as K
from keras import objectives
# Convolutional models
# x is input, z is
def getModels():
input_img = Input(shape=(imageSize, imageSize, 1))
x = Convolution2D(32, 3, 3, border_mode='same')(input_img)
x = ELU()(x)
x = MaxPooling2D((2, 2), border_mode='same')(x)
x = Convolution2D(64, 3, 3, border_mode='same')(x)
x = ELU()(x)
x = MaxPooling2D((2, 2), border_mode='same')(x)
# Latent space // bottleneck layer
x = Flatten()(x)
x = Dense(latent_dim)(x)
z = ELU()(x)
##### MODEL 1: ENCODER #####
encoder = Model(input_img, z)
# We instantiate these layers separately so as to reuse them for the decoder
# Dense from latent space to image dimension
x_decoded_dense1 = Dense(7 * 7 * 64)
# Reshape for image
x_decoded_reshape0 = Reshape((7, 7, 64))
x_decoded_upsample0 = UpSampling2D((2, 2))
x_decoded_conv0 = Convolution2D(32, 3, 3, border_mode='same')
x_decoded_upsample3 = UpSampling2D((2, 2))
x_decoded_conv3 = Convolution2D(1, 3, 3, activation='sigmoid', border_mode='same')
# Create second part of autoencoder
x_decoded = x_decoded_dense1(z)
x_decoded = ELU()(x_decoded)
x_decoded = x_decoded_reshape0(x_decoded)
x_decoded = x_decoded_upsample0(x_decoded)
x_decoded = x_decoded_conv0(x_decoded)
x_decoded = ELU()(x_decoded)
# Tanh layer
x_decoded = x_decoded_upsample3(x_decoded)
decoded_img = x_decoded_conv3(x_decoded)
##### MODEL 2: AUTO-ENCODER #####
autoencoder = Model(input_img, decoded_img)
# Create decoder
input_z = Input(shape=(latent_dim,))
x_decoded_decoder = x_decoded_dense1(input_z)
x_decoded_decoder = ELU()(x_decoded_decoder)
x_decoded_decoder = x_decoded_reshape0(x_decoded_decoder)
x_decoded_decoder = x_decoded_upsample0(x_decoded_decoder)
x_decoded_decoder = x_decoded_conv0(x_decoded_decoder)
x_decoded_decoder = ELU()(x_decoded_decoder)
# Tanh layer
x_decoded_decoder = x_decoded_upsample3(x_decoded_decoder)
decoded_decoder_img = x_decoded_conv3(x_decoded_decoder)
##### MODEL 3: DECODER #####
decoder = Model(input_z, decoded_decoder_img)
return autoencoder, encoder, decoder
In [34]:
# Loads the dataset - here Normalized MNIST
def loadDataset():
from keras.datasets import mnist
(X_train, y_train), (X_test, y_test) = mnist.load_data()
X_train = X_train.reshape([-1,28,28,1])/255.
X_test = X_test.reshape([-1,28,28,1])/255.
return X_train, X_test
In [35]:
import os
import sys
import h5py
import cv2
import math
import random, string
import numpy as np
from scipy.stats import norm
from sklearn import manifold
import matplotlib.pyplot as plt
from matplotlib.offsetbox import OffsetImage, AnnotationBbox
from matplotlib.backends.backend_agg import FigureCanvasAgg as FigureCanvas
# Show every image, good for picking interplation candidates
def visualizeDataset(X):
for i,image in enumerate(X):
cv2.imshow(str(i),image)
cv2.waitKey()
cv2.destroyAllWindows()
# Scatter with images instead of points
def imscatter(x, y, ax, imageData, zoom):
images = []
for i in range(len(x)):
x0, y0 = x[i], y[i]
# Convert to image
img = imageData[i]*255.
img = img.astype(np.uint8).reshape([imageSize,imageSize])
img = cv2.cvtColor(img,cv2.COLOR_GRAY2RGB)
# Note: OpenCV uses BGR and plt uses RGB
image = OffsetImage(img, zoom=zoom)
ab = AnnotationBbox(image, (x0, y0), xycoords='data', frameon=False)
images.append(ax.add_artist(ab))
ax.update_datalim(np.column_stack([x, y]))
ax.autoscale()
# Show dataset images with T-sne projection of latent space encoding
def computeTSNEProjectionOfLatentSpace(X, encoder, display=True):
# Compute latent space representation
print("Computing latent space projection...")
X_encoded = encoder.predict(X)
# Compute t-SNE embedding of latent space
print("Computing t-SNE embedding...")
tsne = manifold.TSNE(n_components=2, init='pca', random_state=0)
X_tsne = tsne.fit_transform(X_encoded)
# Plot images according to t-sne embedding
if display:
print("Plotting t-SNE visualization...")
fig, ax = plt.subplots()
imscatter(X_tsne[:, 0], X_tsne[:, 1], imageData=X, ax=ax, zoom=0.6)
plt.show()
else:
return X_tsne
# Show dataset images with T-sne projection of pixel space
def computeTSNEProjectionOfPixelSpace(X, display=True):
# Compute t-SNE embedding of latent space
print("Computing t-SNE embedding...")
tsne = manifold.TSNE(n_components=2, init='pca', random_state=0)
X_tsne = tsne.fit_transform(X.reshape([-1,imageSize*imageSize*1]))
# Plot images according to t-sne embedding
if display:
print("Plotting t-SNE visualization...")
fig, ax = plt.subplots()
imscatter(X_tsne[:, 0], X_tsne[:, 1], imageData=X, ax=ax, zoom=0.6)
plt.show()
else:
return X_tsne
# Reconstructions for samples in dataset
def getReconstructedImages(X, autoencoder):
nbSamples = X.shape[0]
nbSquares = int(math.sqrt(nbSamples))
nbSquaresHeight = 2*nbSquares
nbSquaresWidth = nbSquaresHeight
resultImage = np.zeros((nbSquaresHeight*imageSize,nbSquaresWidth*imageSize/2,X.shape[-1]))
reconstructedX = autoencoder.predict(X)
for i in range(nbSamples):
original = X[i]
reconstruction = reconstructedX[i]
rowIndex = i%nbSquaresWidth
columnIndex = (i-rowIndex)/nbSquaresHeight
resultImage[rowIndex*imageSize:(rowIndex+1)*imageSize,columnIndex*2*imageSize:(columnIndex+1)*2*imageSize,:] = np.hstack([original,reconstruction])
return resultImage
# Reconstructions for samples in dataset
def visualizeReconstructedImages(X_train, X_test, autoencoder, save=False, label=False):
trainReconstruction = getReconstructedImages(X_train,autoencoder)
testReconstruction = getReconstructedImages(X_test,autoencoder)
if not save:
print("Generating 10 image reconstructions...")
result = np.hstack([trainReconstruction,np.zeros([trainReconstruction.shape[0],5,trainReconstruction.shape[-1]]),testReconstruction])
result = (result*255.).astype(np.uint8)
if save:
cv2.imwrite(visualsPath+"reconstructions_{}.png".format(label),result)
else:
cv2.imshow("Reconstructed images (train - test)",result)
cv2.waitKey()
cv2.destroyAllWindows()
# Computes A, B, C, A+B, A+B-C in latent space
def visualizeArithmetics(a, b, c, encoder, decoder):
print("Computing arithmetics...")
# Create micro batch
X = np.array([a,b,c])
# Compute latent space projection
latentA, latentB, latentC = encoder.predict(X)
add = latentA+latentB
addSub = latentA+latentB-latentC
# Create micro batch
X = np.array([latentA,latentB,latentC,add,addSub])
# Compute reconstruction
reconstructedA, reconstructedB, reconstructedC, reconstructedAdd, reconstructedAddSub = decoder.predict(X)
cv2.imshow("Arithmetics in latent space",np.hstack([reconstructedA, reconstructedB, reconstructedC, reconstructedAdd, reconstructedAddSub]))
cv2.waitKey()
# Shows linear inteprolation in image space vs latent space
def visualizeInterpolation(start, end, encoder, decoder, save=False, nbSteps=5):
print("Generating interpolations...")
# Create micro batch
X = np.array([start,end])
# Compute latent space projection
latentX = encoder.predict(X)
latentStart, latentEnd = latentX
# Get original image for comparison
startImage, endImage = X
vectors = []
normalImages = []
#Linear interpolation
alphaValues = np.linspace(0, 1, nbSteps)
for alpha in alphaValues:
# Latent space interpolation
vector = latentStart*(1-alpha) + latentEnd*alpha
vectors.append(vector)
# Image space interpolation
blendImage = cv2.addWeighted(startImage,1-alpha,endImage,alpha,0)
normalImages.append(blendImage)
# Decode latent space vectors
vectors = np.array(vectors)
reconstructions = decoder.predict(vectors)
# Put final image together
resultLatent = None
resultImage = None
if save:
hashName = ''.join(random.choice(string.lowercase) for i in range(3))
for i in range(len(reconstructions)):
interpolatedImage = normalImages[i]*255
interpolatedImage = cv2.resize(interpolatedImage,(50,50))
interpolatedImage = interpolatedImage.astype(np.uint8)
resultImage = interpolatedImage if resultImage is None else np.hstack([resultImage,interpolatedImage])
reconstructedImage = reconstructions[i]*255.
reconstructedImage = reconstructedImage.reshape([28,28])
reconstructedImage = cv2.resize(reconstructedImage,(50,50))
reconstructedImage = reconstructedImage.astype(np.uint8)
resultLatent = reconstructedImage if resultLatent is None else np.hstack([resultLatent,reconstructedImage])
if save:
cv2.imwrite(visualsPath+"{}_{}.png".format(hashName,i),np.hstack([interpolatedImage,reconstructedImage]))
result = np.vstack([resultImage,resultLatent])
if not save:
cv2.imshow("Interpolation in Image Space vs Latent Space",result)
cv2.waitKey()
cv2.destroyAllWindows()
Matworks MATLAB docs describe how to Visualize Features of a Convolutional Neural Network
and how to Visualize Activations of a Convolutional Neural Network
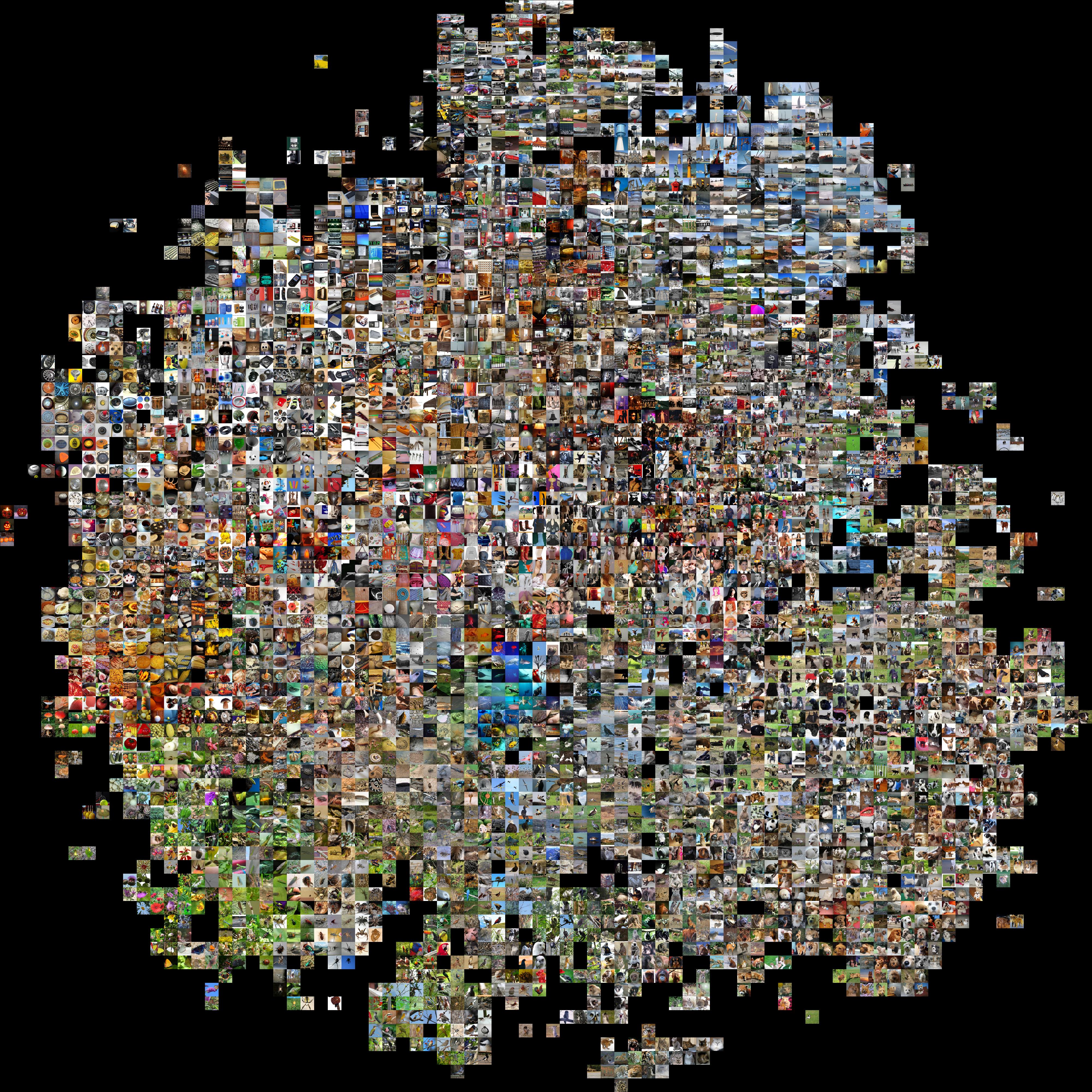
@karpathy took 50,000 ILSVRC 2012 validation images, extracted the 4096-dimensional fc7 CNN (Convolutional Neural Network) features using Caffe and then used Barnes-Hut t-SNE to compute a 2-dimensional embedding that respects the high-dimensional (L2) distances. In other words, t-SNE arranges images that have a similar CNN (fc7) code nearby in the embedding.
'fc7' Fully Connected 4096 fully connected layer
See t-SNE visualization of CNN codes
http://cs.stanford.edu/people/karpathy/cnnembed/cnn_embed_1k.jpg
http://cs.stanford.edu/people/karpathy/cnnembed/cnn_embed_4k.jpg
http://cs.stanford.edu/people/karpathy/cnnembed/cnn_embed_6k.jpg
And below, embeddings where every position is filled with its nearest neighbor. Note that since the actual embedding is roughly circular, this leads to a visualization where the corners are a little "stretched" out and over-represented:
http://cs.stanford.edu/people/karpathy/cnnembed/cnn_embed_full_1k.jpg
http://cs.stanford.edu/people/karpathy/cnnembed/cnn_embed_full_4k.jpg
http://cs.stanford.edu/people/karpathy/cnnembed/cnn_embed_full_6k.jpg
final visualization
http://cs.stanford.edu/people/karpathy/cnnembed/cnn_embed_full_4k_seams.jpg
A linear interpolation (LERP) takes two vectors and an alpha value and returns a new vector that represents the interpolation between the two input vectors.
See LERP - Linear Interpolation https://youtu.be/0MHkgPqc-P4
We take the same start and end images and feed them to the encoder to obtain their latent space representation. We then interpolate between the two latent vectors, and feed these to the decoder.
We can also do arithmetics in the latent space. This means that instead of interpolating, we can add or subtract latent space representations.
For example with faces, man with glasses - man without glasses + woman without glasses = woman with glasses. This technique gives mind-blowing results.
Visualizing the Latent Space of Vector Drawings from the Google QuickDraw Dataset with SketchRNN, PCA and t-SNE http://louistiao.me/posts/notebooks/visualizing-the-latent-space-of-vector-drawings-from-the-google-quickdraw-dataset-with-sketchrnn-pca-and-t-sne/
Last update October 3, 2017
The text is released under the CC-BY-NC-ND license, and code is released under the MIT license.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}